Jag är också en mjukvarukille och inte helt ämnet, men jag försökte modellera ditt system. Varje steg visas så att du kan fånga misstag som jag gjorde.
Här är det schematiska diagrammet för likströmsmotorn: 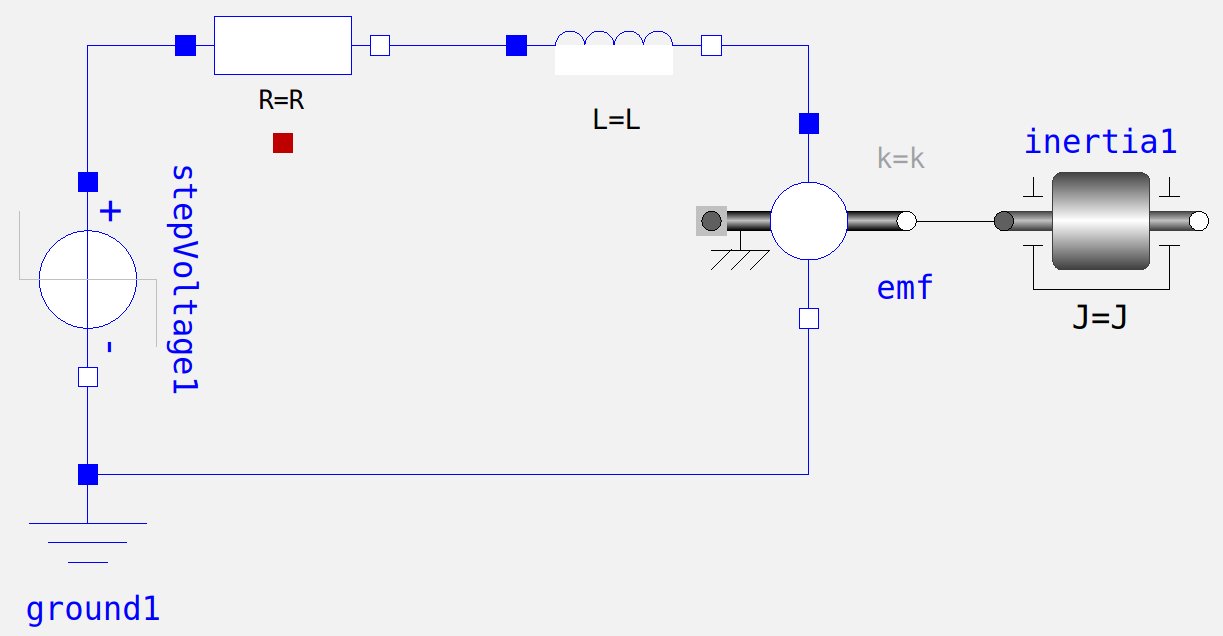
Kirchoffs spänningslag för elektrisk krets: \ begin {ekvation} \ etikett {eq: kirchoff} \ tag {1} V_s = V_l + V_r + V_e \\\ slut {ekvation}
Newtons $ 2 ^ {nd} $ lag rörelse: \ begin {ekvation} \ etikett {eq: newton} \ tag {2} \ sum {F} = ma \ end {ekvation}
Ekvation för elektromotivkraft (EMF): \ börja {ekvation} \ label {eq: emf} \ tag {3} V_e = K_e \ dot {\ theta} \ end {ekvation}
Ekvation för elektromekanisk omvandling av turque: \ begin {ekvation } \ label {eq: torque} \ tag {4} \ tau = K_ti \ end {ekvation}
Använda ekvationer \ ref {eq: kirchoff} & \ ref {eq: emf}: $$ u (t) = L \ frac {di} {dt} + R i + K_e \ dot \ theta $$
Använda ekvationer \ ref {eq: newton} & \ ref {eq: vridmoment}: $ $ K_t i = J \ ddot \ theta $$ Laplace-överföring av ekvationer: $$ U (s) = s LI (s) + RI (s) + s K_e \ Theta (s) \\ K_t I (s) = s ^ 2 J \ Theta (s) $$$ I (s) $ är vanligt: $$ I (s) = \ frac {U (s) - s K_e \ Theta (s)} {s L + R} \\ I (s) = \ frac {s ^ 2 J \ Theta (s)} {K_t} $$
$$ \ frac {U (s) - s K_e \ Theta (s)} {s L + R} = \ frac {s ^ 2 J \ Theta (s)} {K_t} \\ K_t U (s) - s K_t K_e \ Theta (s) = s ^ 3 JL \ Theta (s) + s ^ 2 JR \ Theta (s) \\ K_t U (s) = s ^ 3 JL \ Theta (s) + s ^ 2 JR \ Theta (s) - s K_t K_e \ Theta (s) \\ K_t U (s) = \ Theta (s) (s ^ 3 JL + s ^ 2 JR - s K_t K_e) $$
Överföringsfunktion för system med spänningsingång och positionsutgång: $$ \ frac {\ Theta (s)} {U (s)} = \ frac {K_t} {s ^ 3 JL + s ^ 2 JR - s K_t K_e} $$
Om vi vill undersöka spänningshastighetsförhållandet: $$ s (\ frac {\ Theta (s) } {U (s)}) = s (\ frac {K_t} {s ^ 3 JL + s ^ 2 JR - s K_t K_e}) \\\ frac {s \ Theta (s)} {U (s)} = \ frac {K_t} {s ^ 2 JL + s JR - K_t K_e}) $$
Tillämpar steginmatning, vilket är PWM med 100% arbetscykel: $$ \ Theta (s) = \ frac {\ alpha} {s} \ frac {K_t} {(s ^ 3 JL + s ^ 2 JR - s K_t K_e)} $$
Det kan vara bra att undersöka stabiliteten i ett system med impulsinmatning istället för steginmatning.
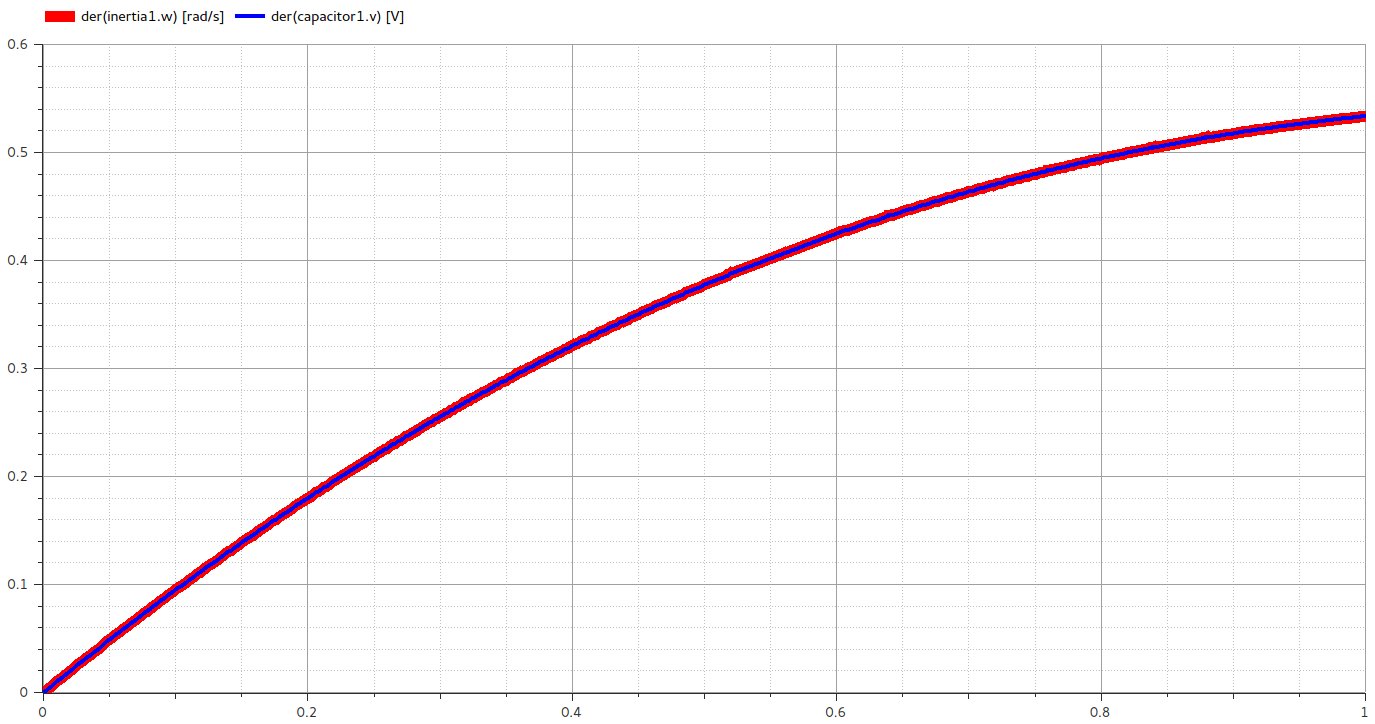
Med mobilitetsanalogi är Voltage & Velocity korsvariabler, Current & Force är genom variabler, du kan också undersöka systemet som RLC-seriekrets som visas nedan. 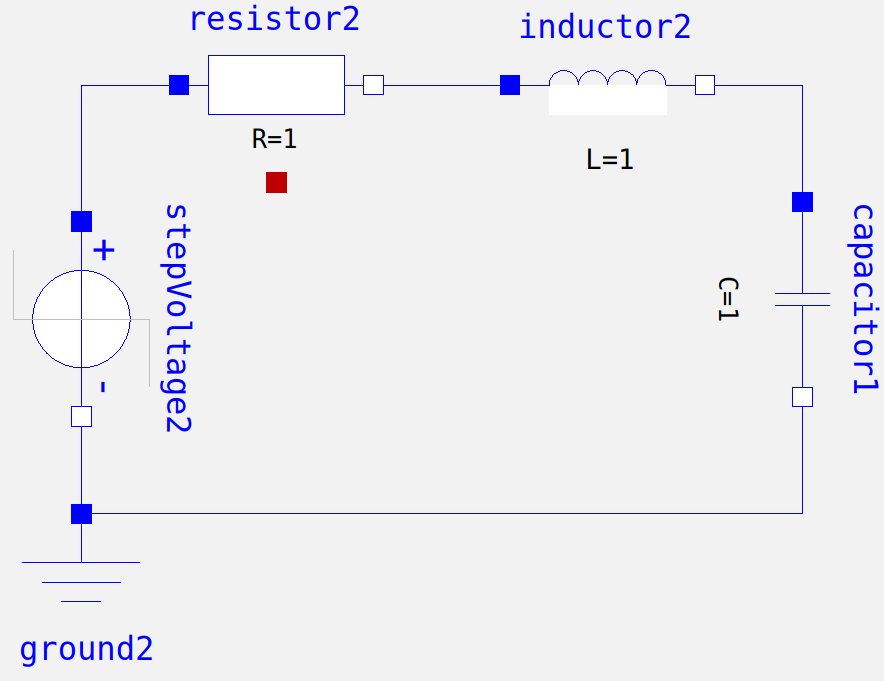
För $ u (t) $ input $ V_c $ output är det spänningshastighetsrelation och $ u (t) $ input $ \ int {v_c (t) dt} $ för spännings-positionsrelation. Så det lägger till ytterligare 1 grad till ditt system.